EUCLID of Ancient Greece
Introduction to Mathematical Logic
What is Planar Geometry?
Euclid’s Axiomatic System
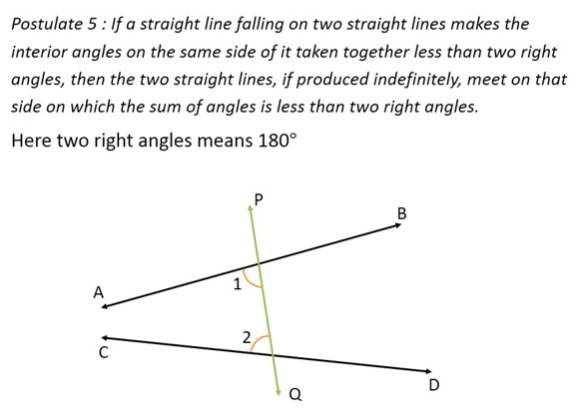
The notorious parallel postulate
Revisiting High School Geometry
It is the glory of geometry that from so few principles, fetched from without, it is able to accomplish so much
— Sir Isaac Newton
This is the first post on my new blog
What are Mathematics and Physics?
Mathematics and Physics are tools to explain the world around us. They provide a condensation of diverse natural phenomena into a few set of basic principles called as laws/postulates/axioms from which all other phenomena can be explained based on just applying logic to the postulates.
Basically if you know the axioms of math and the laws of physics, you will find nature to be just the consequences of application of those laws. Physics is an attempt to condense the description of nature to as few statements as possible and using them to explain everything else by applying logic.
Geometry
One of the most fundamental branches of mathematics is geometry, which is roughly the study of shapes. It is important to physics as well as the stage of mechanics is geometry as we will see.
In mathematics, as with any language, we need to build upon a preliminary set of vocabulary to begin with that captures the basic things around us. The preliminary vocabulary should be easy and obvious enough that everyone understands it in an unambiguous way. All other concepts will have to be defined in terms of this vocabulary only. In geometry, we need to come up with some basic concepts so that everyone else can easily understand it in the same way. What do you think is the basic ingredients for geometry? Let us first study the simplest of all geometries. Geometry in a plane. (Shapes that can be drawn in a notebook roughly).
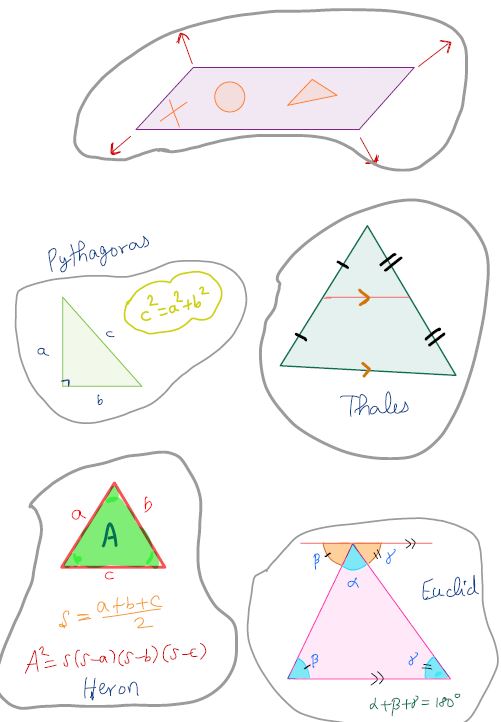
Word 1: Infinite PLANE (Plane)
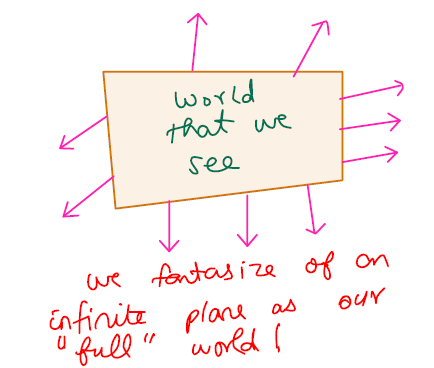
When we say infinite plane, we do not mean the rectangular sheet of paper or rectangular blackboard. We consider the indefinite extensions of the blackboard/paper in all possible directions.Even though we cannot draw an infinite plane or exhibit it physically, we can think of it unambiguously. That is the beautiful part about human thinking and communication in the sense that humans are the only species that can think, communicate and reason with things that do not physically exist but that which exists only on their heads. So this infinite plane is something that we can not physically show but we all can think about it unambiguously. We think of the infinite plane because we can never run out of space to draw as many shapes as we want and of as much size as we please without running out of space. (For example, in a rectangular sheet of dimensions 5x5mm, I cannot have a triangle with sides of length 3000mm). So we think about an infinite plane because alteast theoretically, we do not want to be constrained by the amount of space that exists in a finite sheet which restricts the size of objects that have to be considered. From now on, we will just call the infinite plane, just as the PLANE
So our stage in geometry shall be this plane and hence the geometry that we study will be called planar geometry. What do you now think are the fundamental concepts in plane geometry? What is the smallest and most basic constituent of plane?
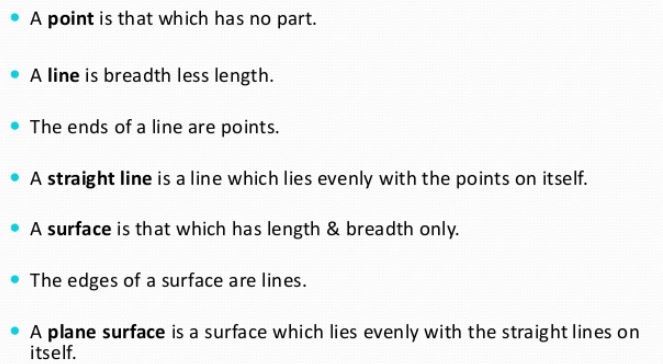
Word 2: POINT
A point is something that is the smallest and most basic, indivisible element of planar geometry. Again, if I ask you to draw a point, you will probably draw something like this below.

But this is not perfectly a point that we imagined in our head because if we zoom into this blot of ink that we had shown as a point, it would be a thick blob and consist of many many points. So in reality, if I indeed mark a point in the plane, you cannot see it at all for it is so tiny! (It has no size). So you see that the concept of a point is also a figment of our human imagination but just that all of us have the same fantasy of a point in our minds as the basic constituent of plane geometry.
This abstraction of a point is needed as it is the simplest of all constituents in a plane.
What do you think is the next most fundamental concept in plane geometry?
Word 3 – LINE SEGMENT
Again this is a very fundamental shape in all of the possible other complicated shapes that we can think of in the plane. Now again if I ask you to draw a line, you will probably draw something like this below:

Again, if you zoom enough, you will see that it has some thickness and other imperfections and so on….
So, again we all have this idealization of a line segment even though we cannot show one perfectly.

Word 4 – LINE / INFINITE LINE / EXTENDED LINE
Physically we can never draw a line as we need an infinite plane to accomodate the extended line.

Like this below, we define several new words which can be taken as the base language of geometry and which are understood to be unambiguous and obvious.
Word 5 – LENGTH
Word 6 – ANGLE
Word 7 – NUMBERS ( and their associated arithmetic like +,-,x,/)
Word 8 – EQUAL/UNEQUAL (for numbers)
Word 9 – SAME/DISTINCT (for geometric objects)
Word 10 – TRANSLATION and ROTATION
Again, one can provide several illustrations to these concepts but the fact remains is that they are all obvious to us and we all think of the same thing when somebody says any of these words to us.
Now that we have defined these basic words, let us see if we can define other notions in terms of these notions. We will go back and cherish our high school geometry memories without resentment however.
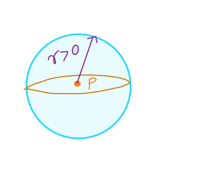
Def 1: CIRCLE
Given a point 


Again, we can think of a circle as something like this below
but again the fact is that we can never draw a perfect circle in practice
Def 2: PARALLEL LINES
Two lines are said to be parallel either if they are the same, or they do not meet all no matter how much extended. Again, we have a strong belief regarding the existence of parallel lines but again physically we can never draw two distinct parallel lines as we have to be sure that they don’t intersect in the entire infinite plane how much ever they are extended. Again this notion should be natural to all.
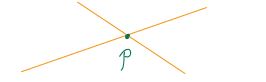
Def 3: INTERSECTING LINES
Two lines are said to intersect if there exists a point
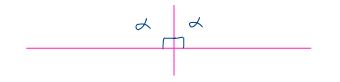
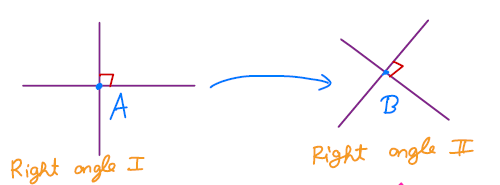
Def 4: RIGHT ANGLE/ PERPENDICULARITY
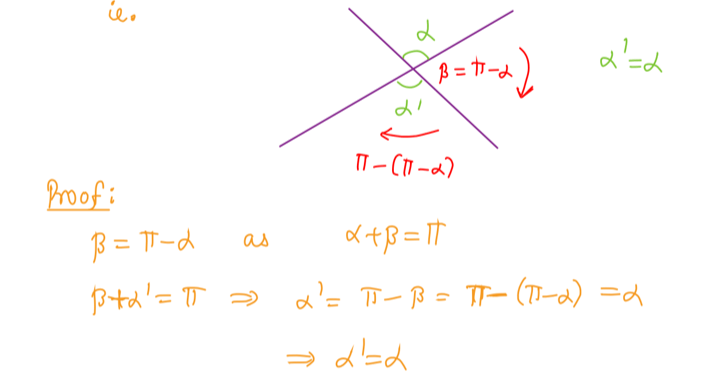
When a line set up on another line makes adjacent angles equal on both sides, then both the angles are said to be right angles and the two lines are said to be perpendicular to each other.
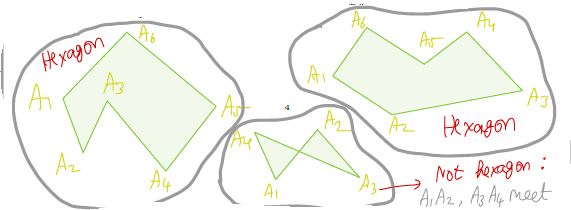
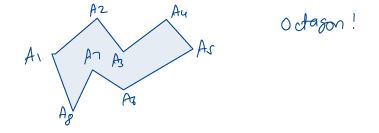
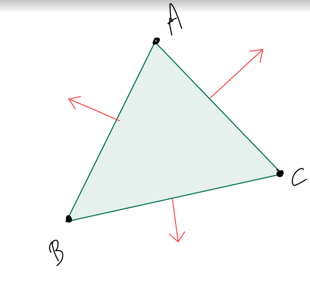
Def 5: POLYGON OF n SIDES (n GON)
A 




n=3 : Triangle
n=4: Quadrilateral
n=5: Pentagon ….
This definition might seem like a mouthful but a little careful look will establish that this is indeed the familiar polygons that we intuitively think of.
Axiomatic Systems
Let us stop with these definitions for now and define more as we need them on the flow. Now that we have a fairly rich set of vocabulary, what shall we do next? Ultimately we want to understand the properties of lines, triangles and stuff in the real world. We need to know what is true about lines, angles, triangles in the plane and what is not true.
For that we need to start with a certain set of “facts” that we believe are true from our experience. These facts are called axioms.
Axioms are taken as unquestioned truths and we use these axioms to answer any other questions that are asked outside these set of axioms. We need axioms to do any mathematics or physics. In physics we call them laws. We have to start with some axioms. If we choose to not believe in the truth of anything, then we won’t get anywhere. Without assuming anything, we cannot expect to prove stuff like Pythagoras Theorem or Thale’s theorem. So in this sense, mathematics is also like a religion. It rests on some statements that are taken as unquestioned truths. There is no point in arguing whether they (axioms)are actually true or not. All we can say is that, if we choose to believe in them, we get so and so facts also coming to be true or false.
There are only two things in framing an axiomatic system. The first thing is that there should be as few statements assumed to be true in an axiomatic system. This is because we do not want to blindly accept too many things to be true for granted. An axiomatic system that has very few statements will not produce much consequences and an axiomatic system that has many statements assumed to be true will have a richer set of consequential statements. The intelligence lies in picking the optimal set of statements such that with as few statements assumed to be true, we get as many results as possible. We have only two requirements for an axiomatic system. They are:
Non-Redundancy (and) Consistency
Let us formally define a non-redundant, consistent axiomatic system:
Def 6:
Given a vocabulary (a set of undefined concepts), a non-redundant and consistent axiomatic system (hereby called just an axiomatic system) is a set of truths involving the vocabulary in the form of statements 
Consistency: All the statements have to be consistent. Using some statements, I should not be able to prove that the other statements in the same axiomatic system to be false. For example, I cannot take S1 as the statement “I am thin” and S2 as the statement “I am not thin”. i.e. The statements present in the axiomatic system do not contradict each other!
Non-redundancy: The system should not contain any statement that can be logically proved from the other statements (the concept of a logical proof is given below). i.e. There should not be indirect repetition of the same statement in another form as another statement. i.e. S1: I am tall and handsome, S2: I am tall. The set 
Having said what is an axiomatic system, we have to establish whether a given statement is true within the framework of an axiomatic system. For that , we introduce the notion of a proof of a statement in a given axiomatic system.
Def 7:
Given a statement 






More informally, we start with an axiomatic statement, deduce from it through logical implications only, finally establish the given statement
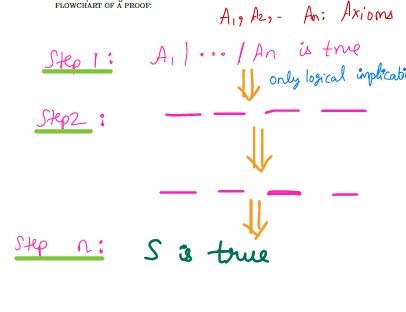
NOTE: The proof of a statement, if exists need not be unique. There can be several proofs to the same statement with one being in 5 steps and the other being 500 steps. It is the ingenuity of the reader to find out the shortest proof(s) of a statement if it is true.
There may be several questions plaguing us formally now for the over curious reader!
Question 1: How do we know if a given axiomatic system is consistent? In principle, we have to consider all possible logical implications of all subsets of the statements and check that they do not contradict any of the statements that are not in the subset. Seems like a Herculean task!!
Question 2: How do we know if a given axiomatic system is non-redundant? We have to check if each statement can be proved from logical consequences of the remaining set of statements. Again sounds a tough job!! We will encounter these questions in geometry too!
Finally, Question 3:
If a statement
The last question might seem peculiar as we believe that every statement that is true from the axioms got to be provable from it but the surprising answer is a resounding no in even many simple cases:
Theorem 1 (Godel’s incompleteness Theorem ) – stated without proof
Any axiomatic system that contains and captures the arithmetic of natural numbers contains a statement that is true but cannot be proved!
Note that this is shocking as natural numbers and their arithmetic are very basic to all of mathematics and our geometry vocabulary does indeed contain in New Term 7, not only natural numbers but all kinds of numbers!!
Note that Godel proved this theorem in 1930 using the axioms of set theory but the proof is very complicated and goes into the deep abyss of mathematical logic and hence will take us far too apart from where we want to go. But all the statements that we normally encounter in geometry can be proved or disproved and hence we shall not be worried about Godel type statements popping up. But the question of redundancy and consistency even though difficult, will be important in geometry as we shall see.
Now, having said that our vocabulary is consisting of new terms 1-10 and the derived vocabulary from definitions 1-5, what shall we take as the axioms of planar geometry? There are several axiomatic systems possible that are the same.
Def 8: EQUIVALENCE OF TWO AXIOMATIC SYSTEMS
Two axiomatic systems are said to be the same or equivalent if each axiom in each system can be proved from the axioms of the other system
i.e. The statements that are true/false in one axiomatic system are also true/false in the other axiomatic system and vice versa.
Axiomatic System for Planar Geometry
There are several possible axiomatic systems in plane geometry but the most widely and most accepted axiomatic system that is still in use today was framed by a Greek mathematician Euclid of ancient Greece around 300 to 200 B.C. Euclid’s axiomatic system consists of some 5 statements regarding geometric objects and 5 statements regarding numbers and their arithmetic. The first five statements are called “postulates” and the second five are called “common notions”. As we shall see, all the postulates of Euclid (except one) are very obvious that we ourselves might have developed them. We now state them as Euclid did.
EUCLID’s AXIOMATIC SYSTEM:
Postulates:
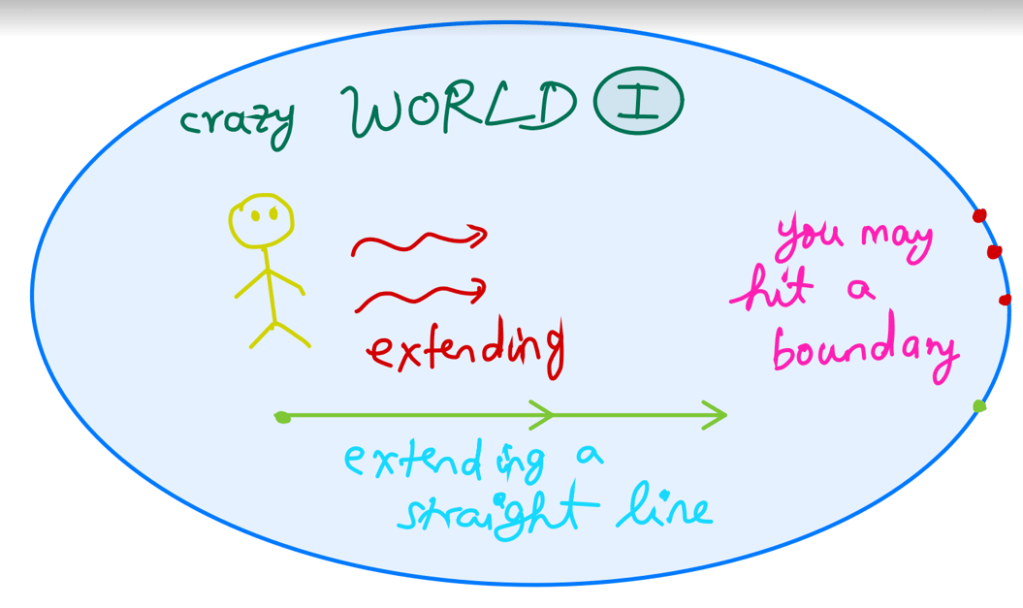
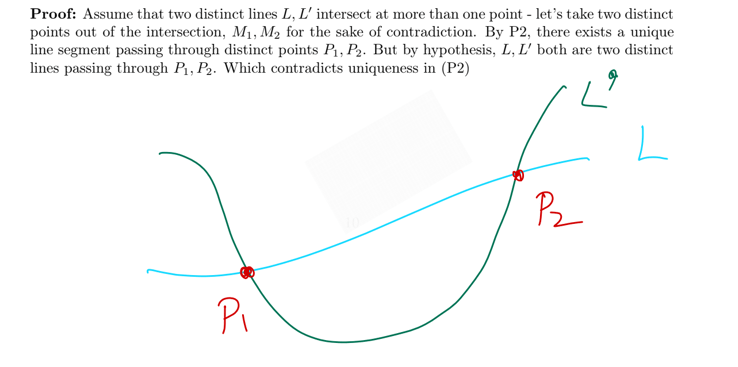
(P1) Given a line segment, it can be extended uniquely to an infinite line segment that contains the original line segment

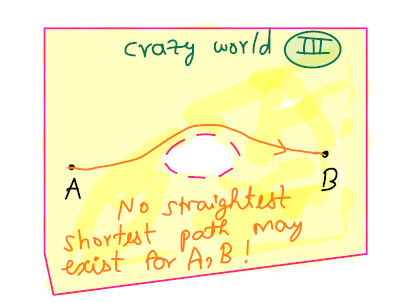
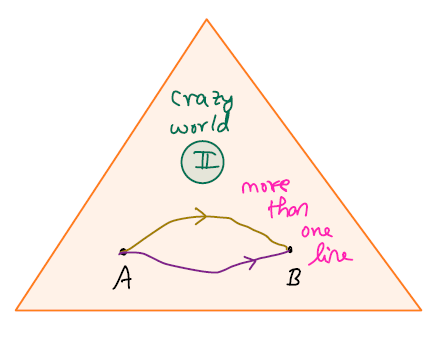
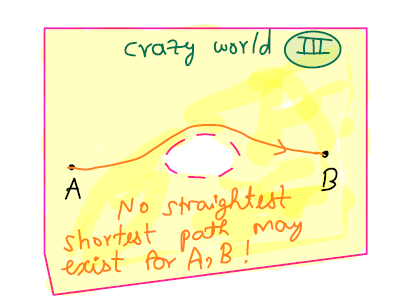
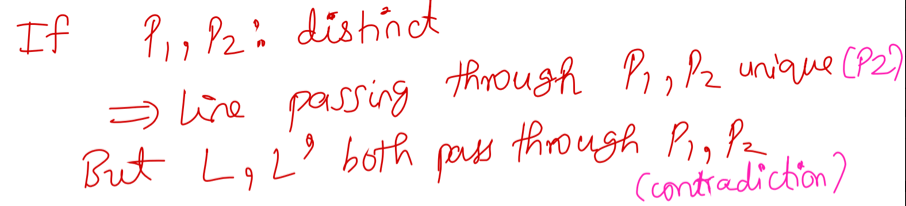
(P2) Given two distinct points, there exists a unique line segment (and hence by postulate 1, a unique line) that contains the given two points

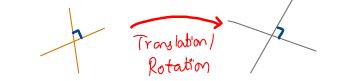
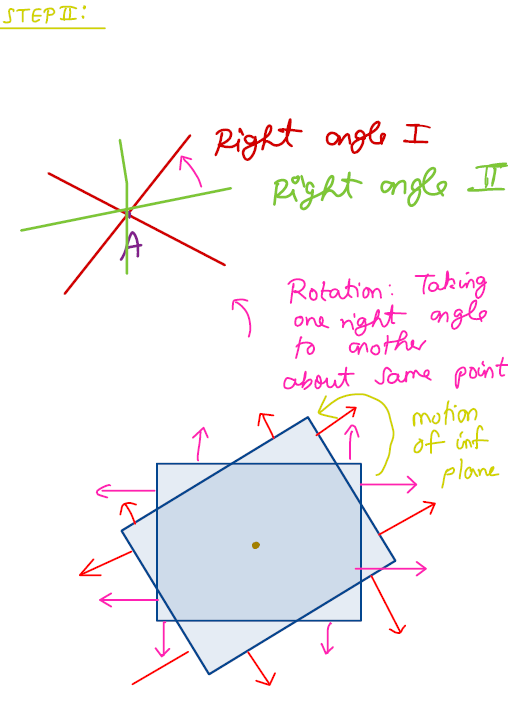
(P3) All right angles are equal. They can be obtained by translation and rotation of any given right angle.
(P4) Given any point

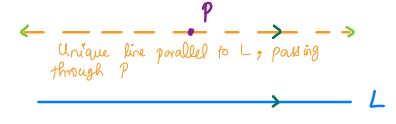
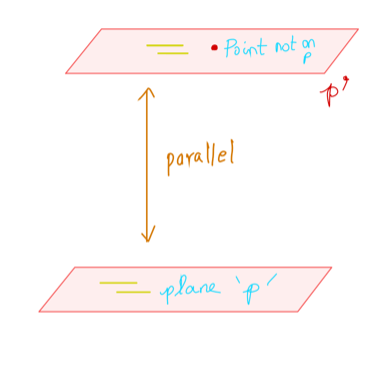
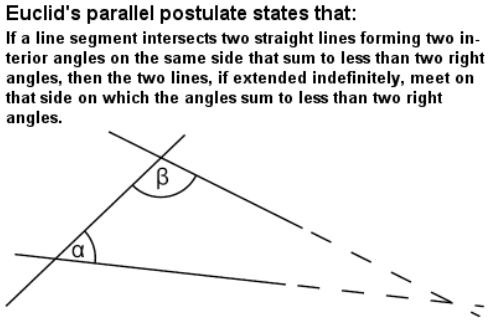
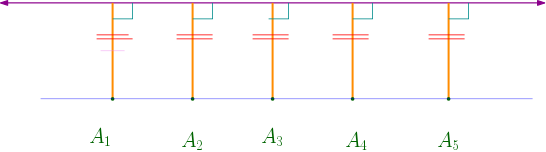
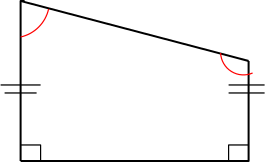
(P5) Parallel Postulate: Given a line 

Common notions:
(P6) If 


(P7)If

(P8) If 
(P9) The whole is greater than the part
(P10) Things which coincide with one another (through translation/rotation) are equal to one another (also called as congruent to one another)
One more postulate was added more recently that was used implicitly used by Euclid but was not stated because it was far too obvious
(P11) There exists three points in the plane such that they all do not lie on a same line
We see that these postulates are so self evident (except P5 which we will return later).
But now we have to ask: Is this axiomatic system consistent and non-redundant?
One can prove using rigorous logic that Euclidean axioms are indeed consistent (we shall not do it now) . ie. no statement of Euclid contradicts any of his other statements. But the question of redundancy was a delicate issue. The parallel postulate caused a problem. Since the parallel postulate P5 was not as obvious as the remaining ones, many including Euclid himself hoped that P5 could be logically proved from the remaining postulates. Many people (starting from Euclid himself) tried to remove the parallel postulate from the axiomatic system by proving it as a logical consequence of other 4 postulates but they were unsuccessful. There were some who claimed to succeeding in proving the parallel postulate but a careful examination of their proof showed that in proving so, they had assumed some other statement to be true implicitly and that statement (even though looking more obvious than the parallel postulate) when combined with the remaining postulates turned out to be logically equivalent to the Euclidean axiomatic system with the parallel postulate itself, thus replacing the parallel postulate with some other equivalent postulate within the framework of the remaining axioms.
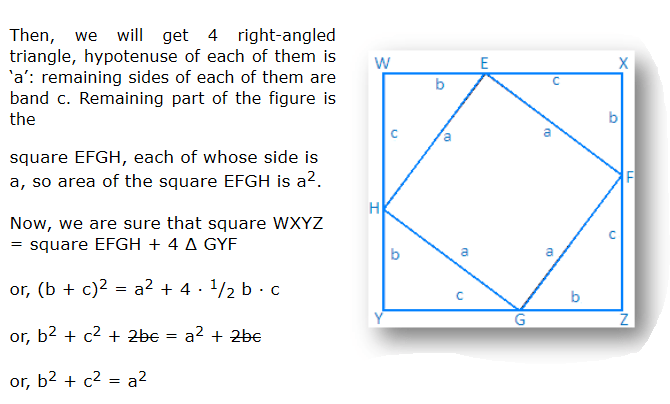
But Euclid needed the parallel postulate to prove several important results like the sum of interior angles of a triangle being equal to two right angles, Pythagoras theorem and many other important geometric facts. In fact, Euclid wrote a 13 volume book series titled Elements that contained proofs to hundreds of theorems about various geometric shapes, all just using the five postulates and five common notions as axiomatic system!!! So these five statements can explain 13 volumes book worth of facts!! But if the parallel postulate were removed ,then only first 28 theorems could be proved by Euclid which were very trivial. Thus, without the parallel postulate, the work was few pages but with the parallel postulate, it was 13 volumes!! So the parallel postulate was indeed very important to planar geometry.
Now we know that the parallel postulate cannot be proved from the remaining four postulates and hence it is independent logically from the other four postulates (which also we shall not prove)
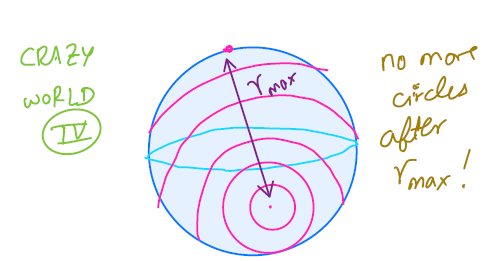
NOTE: The question as to what happens when we modify the parallel postulate is the subject of non Euclidean geometry and will lead to curvature! (in future weeks!)
NOTE: Note that several of Euclid’s axioms contains the phrase ‘there exists a unique‘ and this has to be taken carefully with a pinch of salt. It not only says the proposed entity exists but it is unique. i.e. There cannot be more than two distinct proposed entities that exist. It is a highly powerful statement. Existence and uniqueness are independent. Somethings may exist but not unique and some other things are unique if exists but need not exist.
Euclid’s Elements continues to be the standard of modern high school geometry and is printed more than the Bible!
Now this Euclidean geometry is very important as an axiomatic system as geometric mechanics seeks to generalize Euclid’s axiomatic system. Before discussing deeper issues on the axiomatic system of Euclid, let us prove some well known geometric results from Euclid’s axioms.
These should take you back to the proofs of high school geometry. Now we are doing all these because all of it has a deep connection with the general theory of relativity. It might not be evident but General Relativity evolved from Euclid to Descartes to Galileo to Newton to Gauss to Riemann to Einstein!!
Let us now prove some results from the axioms as given in Euclid’s Elements. I am doing this because I want to replace the Parallel Postulate in Euclid’s axiomatic system to the following two equivalent statements:
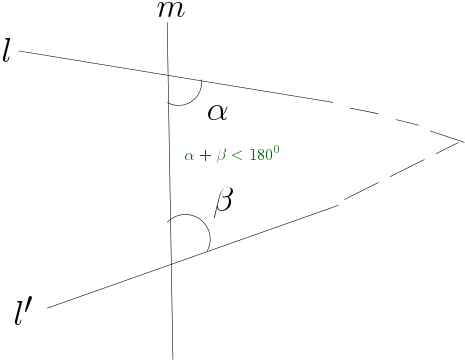
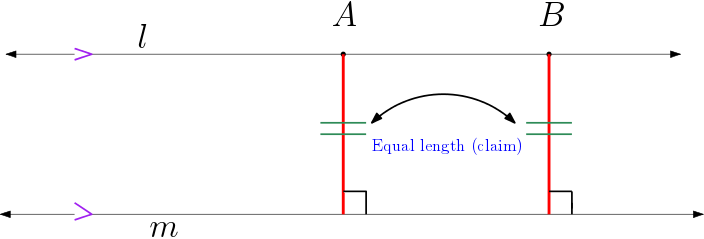
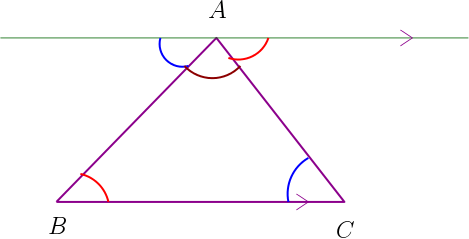
Statement 1: If a straight line 


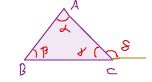
Statement 2: The sum of the three interior angles of a triangle is 

What is meant by this is that the axiomatic system of Euclid (P1-P11) is same as (P1-P4+Statement 1 + P6-P11) AND (P1-P4 + Statement 2 + P6-P11). In the presence of remaining postulates, the parallel postulate can be shown to prove and to be proved from any of the two statements above.
NOTE: Euclid originally stated Statement 1 only and the parallel postulate that we use is called Playfair’s Axiom. Anyways once we prove the logical equivalence of the three statements, what we started off with is immaterial.
Why are we bothered about these other forms of the parallel postulate? Statement 2 has a deep connection with Einstein’s Relativity. We will begin to explore that in the next post of the blog!! But we will just start the flow of the importance now. Let us put the equivalent statements again below:
Statement 1: If a straight line
Parallel Postulate: Given a line
Statement 2: The sum of the three interior angles of a triangle is
Statements 1 and Parallel Postulate involve indefinite extensions of lines. In statement 1, it just says that the two lines when extended, meet somewhere in the plane. We are not guaranteed that they will meet within this region or sorts. Similarly, in parallel postulate, to check if two lines are parallel, we have to extend the lines indefinitely and ensure that they do not meet how much ever we extend. Again, they involve the entire infinite plane as they talk about extended lines, parallelism and meeting somewhere. But the statement that the sum of three angles of a triangle is
If you are interested in how the two statements are logically equivalent to the parallel postulate, you may consult this PDF below. It is not difficult!! (just requires some investment of your precious time)
Link to the PDF: (will be posted soon)
 which is set of all triplets of real numbers
which is set of all triplets of real numbers  such that distance between two points
such that distance between two points  is
is 
 be another variable that is a function of
be another variable that is a function of  . Now, the result that we need to prove is:
. Now, the result that we need to prove is: satisfy the following properties:
satisfy the following properties: and
and  satisfy
satisfy  and
and  . Then,
. Then, ![f[(x_1,t_1)]-f[(x_2,t_2)]=f[(x_1',t_1')]-f[(x_2',t_2')]](https://s0.wp.com/latex.php?latex=f%5B%28x_1%2Ct_1%29%5D-f%5B%28x_2%2Ct_2%29%5D%3Df%5B%28x_1%27%2Ct_1%27%29%5D-f%5B%28x_2%27%2Ct_2%27%29%5D&bg=FFFFFF&fg=181818&s=0&c=20201002)
![f([x,t])-f([x',t])=x-x'](https://s0.wp.com/latex.php?latex=f%28%5Bx%2Ct%5D%29-f%28%5Bx%27%2Ct%5D%29%3Dx-x%27&bg=FFFFFF&fg=181818&s=0&c=20201002)
 ,
,  . So,
. So,  coordinates at a given time. So for a given
coordinates at a given time. So for a given  where
where  is some constant. But as time progresses,
is some constant. But as time progresses, 
 , we get that
, we get that  if
if  , we have that
, we have that  if
if 
 as only a linear function of
as only a linear function of  remains constant. So ,we have
remains constant. So ,we have 

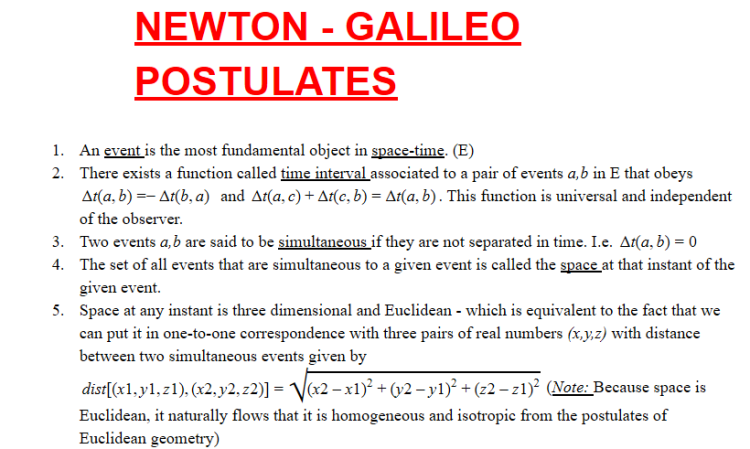
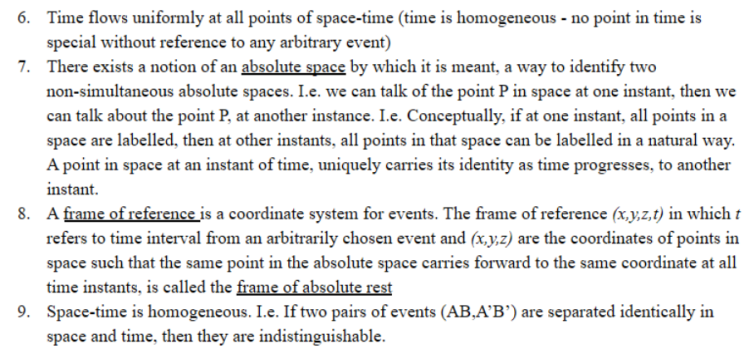
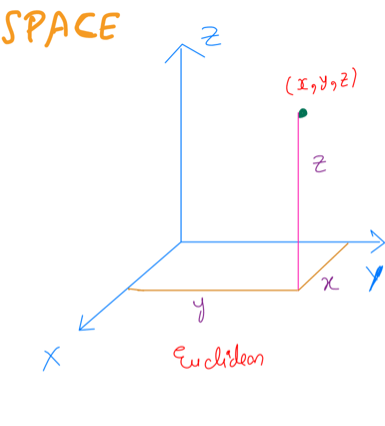
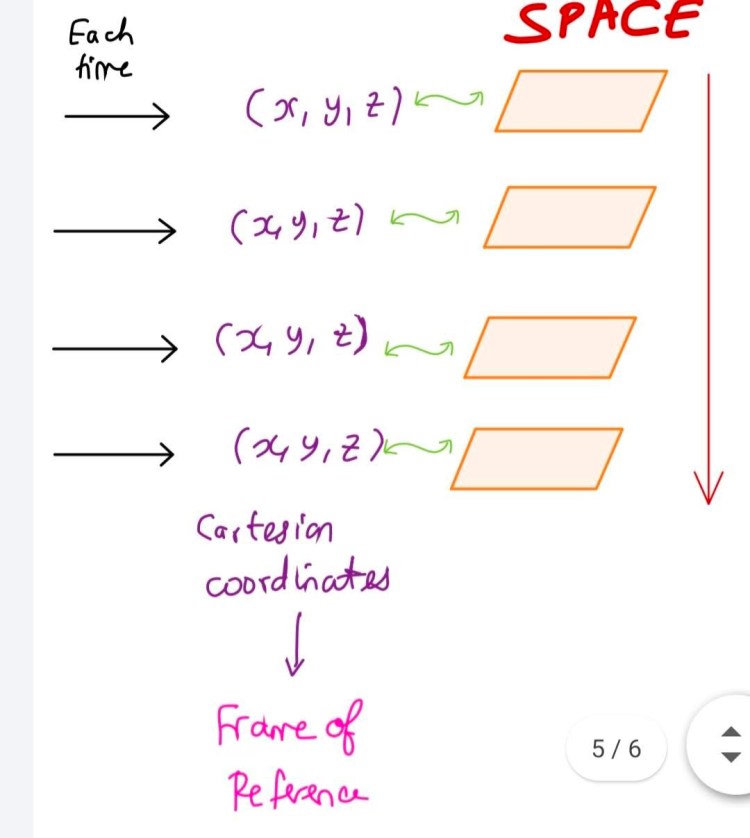
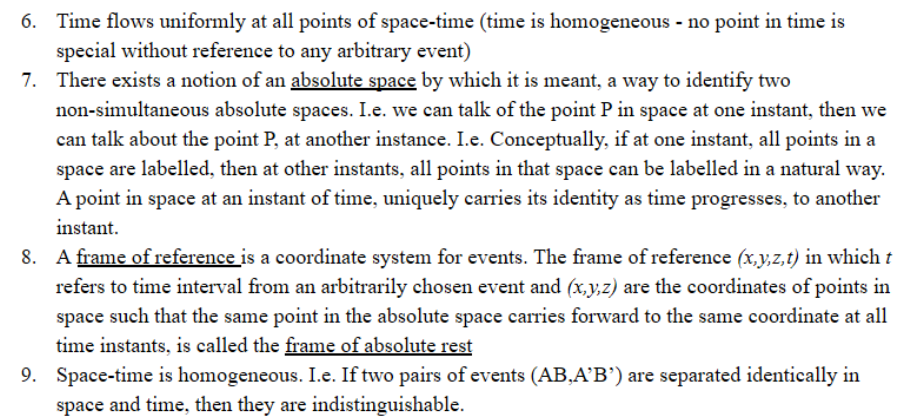
 where (x,y,z) are its coordinates in absolute space with respect to the reference event as origin, and (t) is the time elapsed from the reference event. It is a natural coordinate system as the same point in absolute space always goes to the same spatial coordinates. It is very natural as it respects the absolute space concept of space-time.
where (x,y,z) are its coordinates in absolute space with respect to the reference event as origin, and (t) is the time elapsed from the reference event. It is a natural coordinate system as the same point in absolute space always goes to the same spatial coordinates. It is very natural as it respects the absolute space concept of space-time. 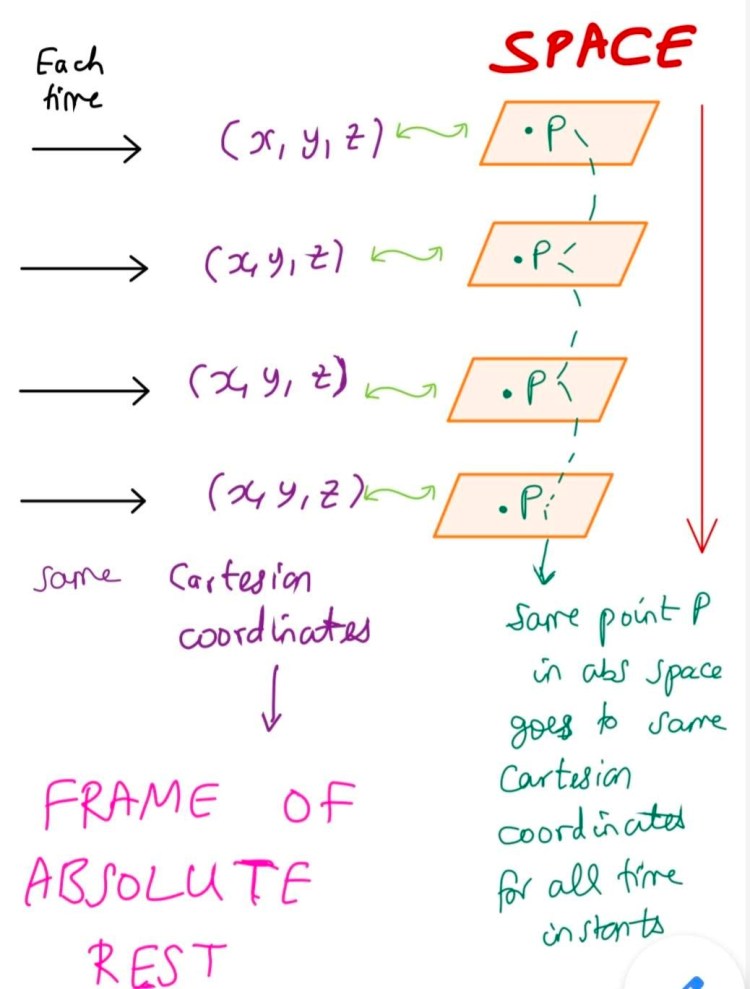
 and
and  is given by
is given by  and the time separation between the two events is
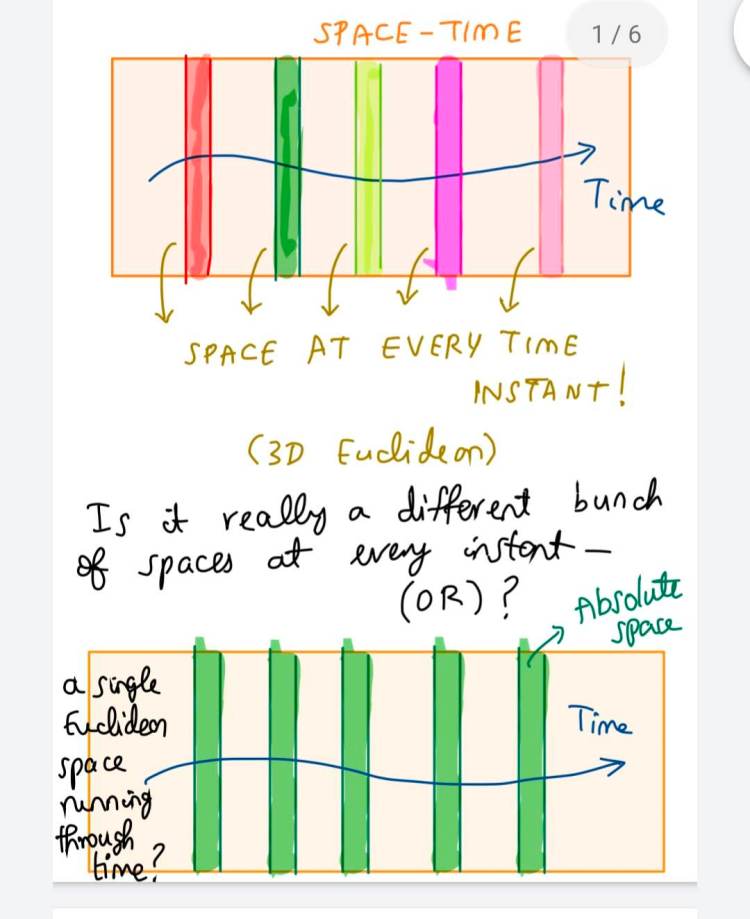
and the time separation between the two events is  as the first 3 coordinates of the event are the coordinates of the point of the event in absolute space. But if we do not believe in the idea of an absolute space, it does not makes sense as two non-simultaneous events cannot be compared spatially as it does not make sense to retain the spatial identity of a point as time progresses.
as the first 3 coordinates of the event are the coordinates of the point of the event in absolute space. But if we do not believe in the idea of an absolute space, it does not makes sense as two non-simultaneous events cannot be compared spatially as it does not make sense to retain the spatial identity of a point as time progresses.  and
and  is given by
is given by  and
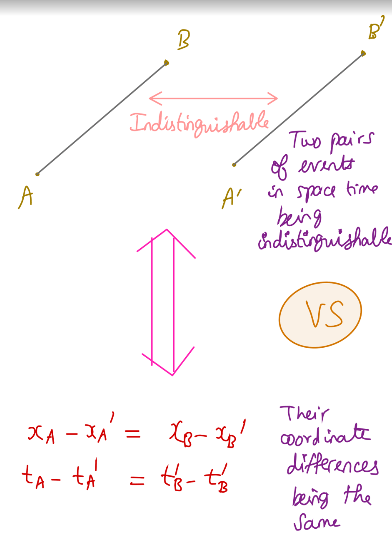
and  are separated identically in space and time, if and only if
are separated identically in space and time, if and only if  ,
,  ,
,  and
and  (Eqn *)
(Eqn *)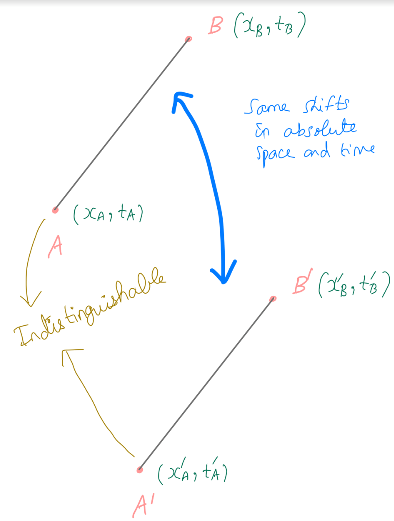
 . Now let
. Now let  be some other coordinates for space time.
be some other coordinates for space time. 
 and
and  is given by
is given by  (Note that it makes sense to talk about two points at same time as the set of all simultaneous events forms a 1 dimensional Euclidean space -we have assume our space to be one-dimensional) “, we must have that
(Note that it makes sense to talk about two points at same time as the set of all simultaneous events forms a 1 dimensional Euclidean space -we have assume our space to be one-dimensional) “, we must have that  where
where  are two simultaneous events. Hence, we must have
are two simultaneous events. Hence, we must have  by taking the same line of arguments done in proving the second part of the technical result in the beginning! If you look back, it is the exactly same problem here.
by taking the same line of arguments done in proving the second part of the technical result in the beginning! If you look back, it is the exactly same problem here. are separated identically in space and time, if and only if
are separated identically in space and time, if and only if 

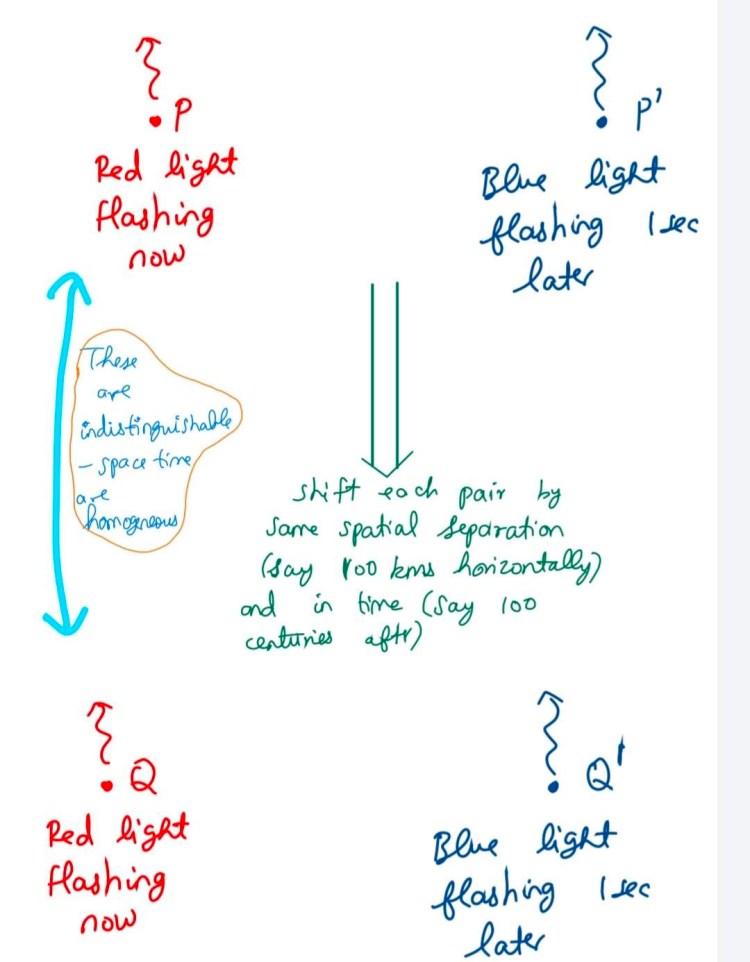
 , and consider the event pairs:
, and consider the event pairs:  and
and  . The above two pairs are indistinguishable in absolute rest frame as their spatial and time separations are identical. But it is not true in the new frame related as
. The above two pairs are indistinguishable in absolute rest frame as their spatial and time separations are identical. But it is not true in the new frame related as 
 , then it means that I am moving at a uniform motion through absolute space with constant velocity
, then it means that I am moving at a uniform motion through absolute space with constant velocity  . But putting
. But putting  , gives
, gives  , which means that
, which means that 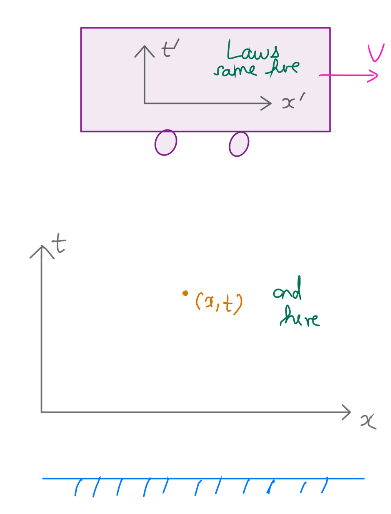

 , then
, then  (velocity changes from one inertial frame to another), but differentiating once more, we get
(velocity changes from one inertial frame to another), but differentiating once more, we get

 .
. 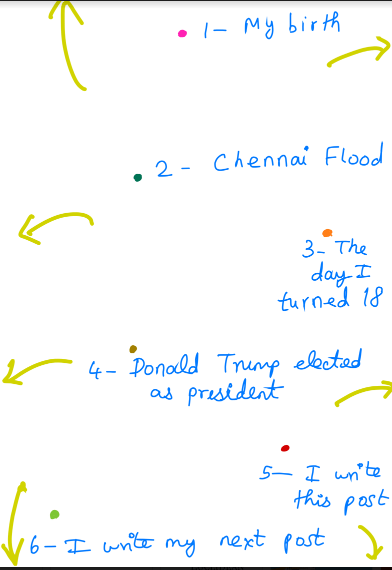

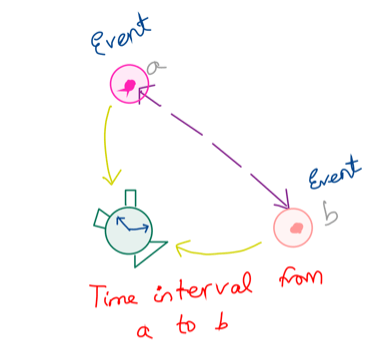
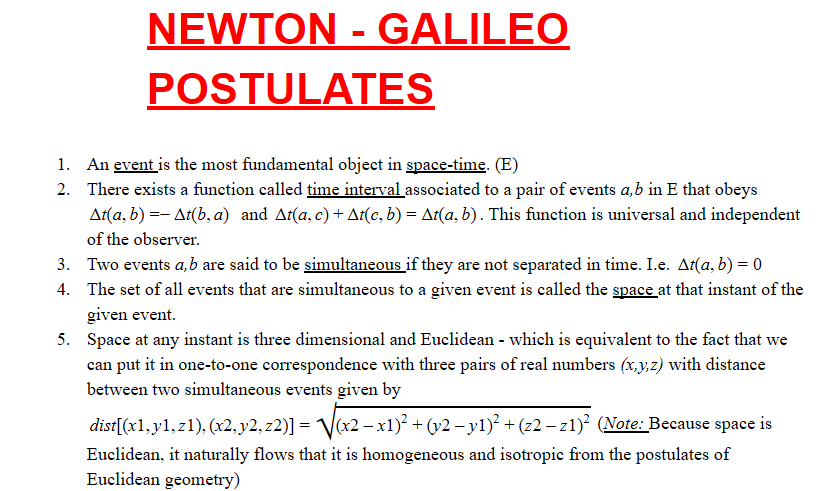
 , there exists a number called the TIME INTERVAL between events
, there exists a number called the TIME INTERVAL between events  (says that if event ‘a’ happened 3 second before event b, then event ‘b’ happened -3 seconds before event ‘a’ or that ‘b’ happened 3 seconds after ‘a’
(says that if event ‘a’ happened 3 second before event b, then event ‘b’ happened -3 seconds before event ‘a’ or that ‘b’ happened 3 seconds after ‘a’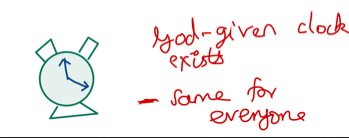
 for any three events a,b,c
for any three events a,b,c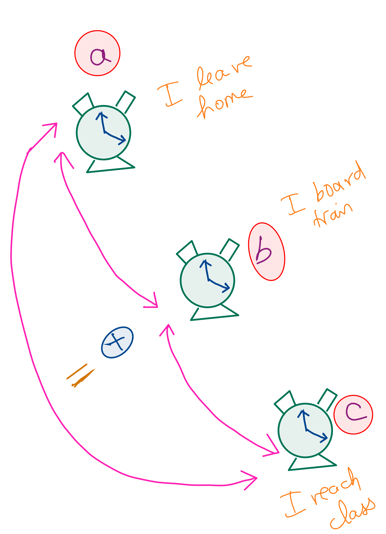
 . This is a very natural definition. Since time interval is a universal concept, independent of the observer, the notion of simultaneity is also absolute and universal. If one observer observes two events to be simultaneous, another observer also observes it to be simultaneous.
. This is a very natural definition. Since time interval is a universal concept, independent of the observer, the notion of simultaneity is also absolute and universal. If one observer observes two events to be simultaneous, another observer also observes it to be simultaneous.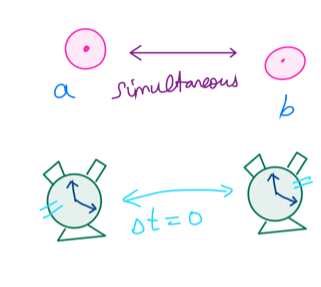
 , and
, and  , then by additivity of intervals,
, then by additivity of intervals,  . So, ‘a’ and ‘b’ are simultaneous as well.
. So, ‘a’ and ‘b’ are simultaneous as well. 
 (exchanging the two slots) and hence $\Delta t(a,a)=0$
(exchanging the two slots) and hence $\Delta t(a,a)=0$ 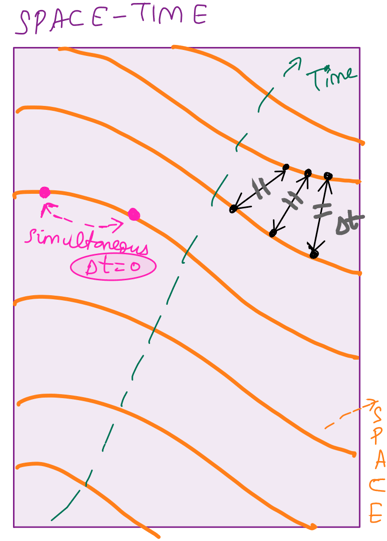
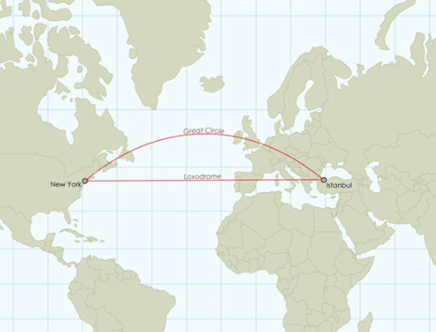
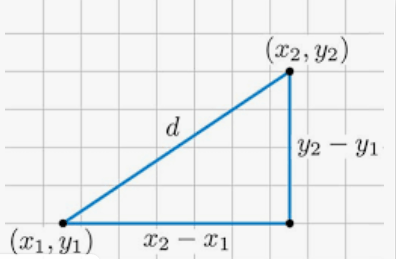
 , with distance between two points
, with distance between two points ![dist[(x_1,y_1),(x_2,y_2)]=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2}](https://s0.wp.com/latex.php?latex=dist%5B%28x_1%2Cy_1%29%2C%28x_2%2Cy_2%29%5D%3D%5Csqrt%7B%28x_2-x_1%29%5E2%2B%28y_2-y_1%29%5E2%7D&bg=FFFFFF&fg=181818&s=0&c=20201002) , it looks like our space is not Euclidean plane! Just a single plane of Euclid is not seemingly enough to cover all of space.
, it looks like our space is not Euclidean plane! Just a single plane of Euclid is not seemingly enough to cover all of space. 
![dist[(x_1,y_1,z_1),(x_2,y_2,z_2)]=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2+(z_2-z_1)^2}](https://s0.wp.com/latex.php?latex=dist%5B%28x_1%2Cy_1%2Cz_1%29%2C%28x_2%2Cy_2%2Cz_2%29%5D%3D%5Csqrt%7B%28x_2-x_1%29%5E2%2B%28y_2-y_1%29%5E2%2B%28z_2-z_1%29%5E2%7D&bg=FFFFFF&fg=181818&s=0&c=20201002)




 . But since Achilles starts at 0 initially, A(0)=0. So Achilles motion is given by
. But since Achilles starts at 0 initially, A(0)=0. So Achilles motion is given by  . On the other hand, let the tortoise position be given by T(t). Tortoise speed is half and initially starts at 1. So we have
. On the other hand, let the tortoise position be given by T(t). Tortoise speed is half and initially starts at 1. So we have  and putting T(0)=1, we have
and putting T(0)=1, we have  . Now, we see clearly that for t<2,
. Now, we see clearly that for t<2,

 for Achilles to reach where the tortoise was initially.
for Achilles to reach where the tortoise was initially. .
.  . This will take some time
. This will take some time  .
. .
.  no matter however low.
no matter however low.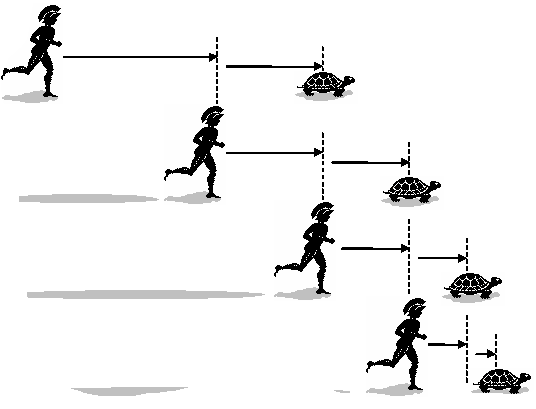
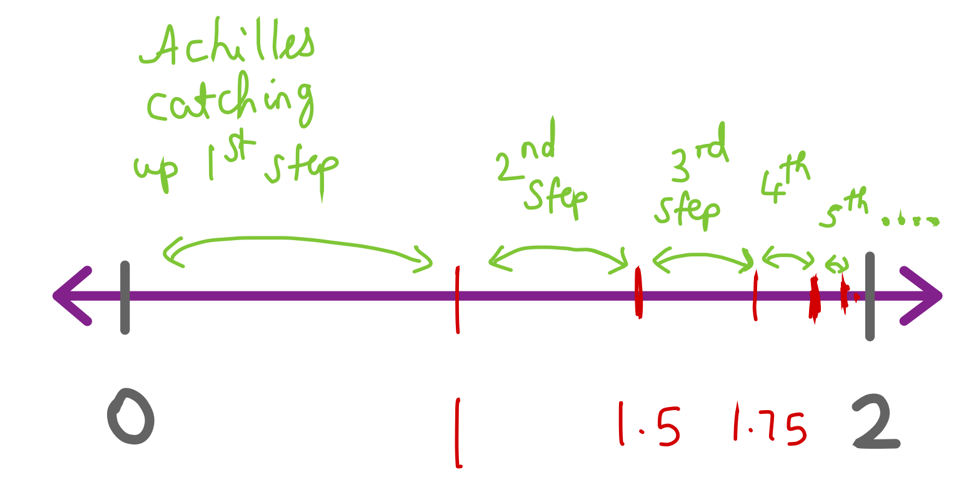
 seconds to reach the tortoise and each of the
seconds to reach the tortoise and each of the  are positive and nonzero, however small. So Zeno argues that it is not possible that Achilles can catch up with the tortoise in two seconds, because Achilles will have to keep following the tortoise. So, he argues that logically, the possibility of Achilles overtaking the tortoise is impossible.
are positive and nonzero, however small. So Zeno argues that it is not possible that Achilles can catch up with the tortoise in two seconds, because Achilles will have to keep following the tortoise. So, he argues that logically, the possibility of Achilles overtaking the tortoise is impossible.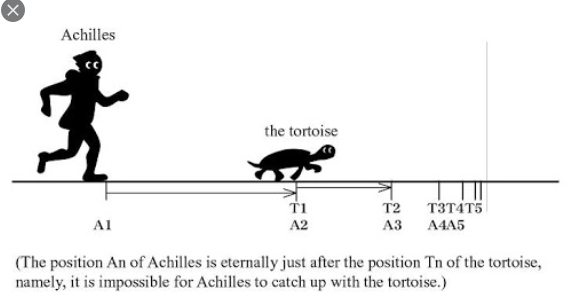

 seconds which is
seconds which is seconds
seconds . Then
. Then 


![S_n=2(1-[\frac{1}{2}]^n))=2-(\frac{1}{2}^{n-1})](https://s0.wp.com/latex.php?latex=S_n%3D2%281-%5B%5Cfrac%7B1%7D%7B2%7D%5D%5En%29%29%3D2-%28%5Cfrac%7B1%7D%7B2%7D%5E%7Bn-1%7D%29&bg=FFFFFF&fg=181818&s=0&c=20201002)
 seconds for Achilless to overtake the tortoise
seconds for Achilless to overtake the tortoise 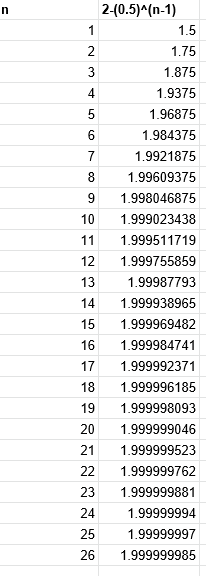
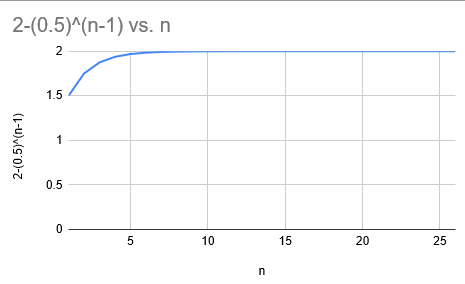
 becomes closer and closer to 2. Although it never does become
becomes closer and closer to 2. Although it never does become  , we observe that it keeps getting closer and closer to 2.
, we observe that it keeps getting closer and closer to 2.  , I give a diagrammatic proof below:
, I give a diagrammatic proof below: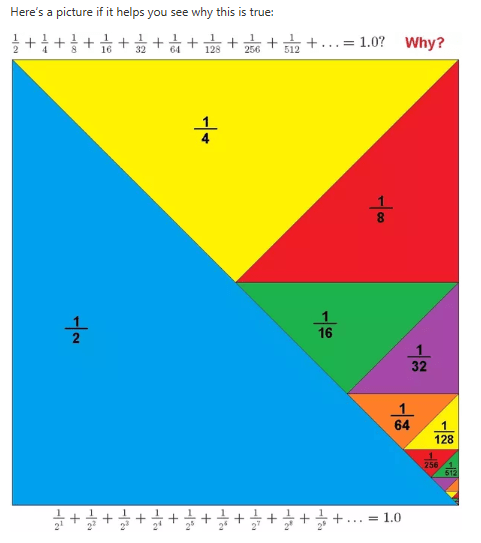
 and we realize that although we can never reach the full unit square by pasting any finite number of those pieces all together, we can get how much ever closer we want to
and we realize that although we can never reach the full unit square by pasting any finite number of those pieces all together, we can get how much ever closer we want to  because the residual area
because the residual area  goes arbitrarily small as
goes arbitrarily small as 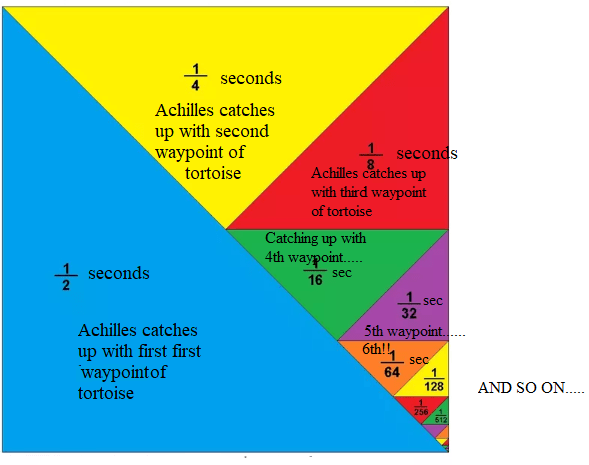
 then, we keep getting ever larger and larger numbers as we keep adding more and more terms (this is what happens when the tortoise is twice as fast as Achilles) and hence in this case adding infinite sums won’t make sense and is not expected to make sense as in this time, Achilles can never catch up with tortoise in any finite time.
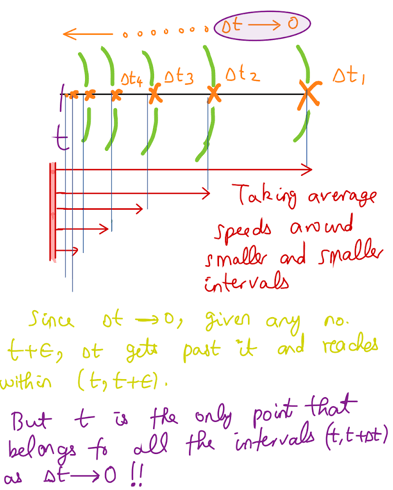
then, we keep getting ever larger and larger numbers as we keep adding more and more terms (this is what happens when the tortoise is twice as fast as Achilles) and hence in this case adding infinite sums won’t make sense and is not expected to make sense as in this time, Achilles can never catch up with tortoise in any finite time.  is said to converge to a number “a”, if given any tolerance
is said to converge to a number “a”, if given any tolerance  , there exists a large enough number N such that for all
, there exists a large enough number N such that for all  , we have that
, we have that 

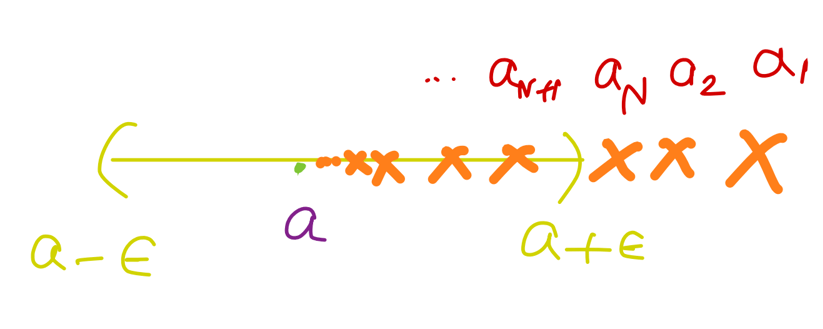
 to a, after a certain stage, the sequence gets that close to a
to a, after a certain stage, the sequence gets that close to a after which the elements of the sequence all come and fall into that
after which the elements of the sequence all come and fall into that  converges to 2 seconds. When a sequence of sums
converges to 2 seconds. When a sequence of sums  converges to a number
converges to a number  is
is 


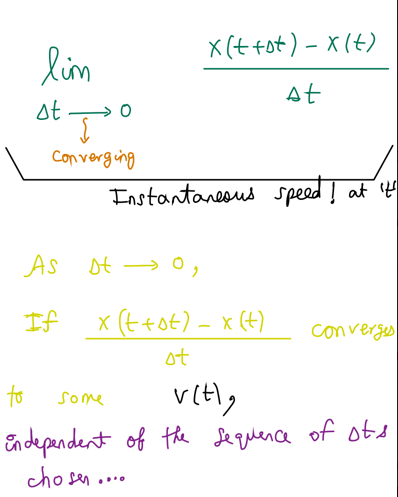
 and this number will be independent of
and this number will be independent of  chosen (as long as
chosen (as long as  ) since we are given that it always covers equal intervals of distance in equal intervals of time.
) since we are given that it always covers equal intervals of distance in equal intervals of time.  . Definitely, the speed depends on
. Definitely, the speed depends on  where
where 
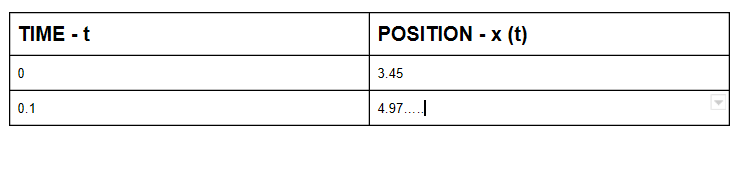
 so that we do not use any other instant to calculate speed. But we cannot make
so that we do not use any other instant to calculate speed. But we cannot make  , Newton objects by saying that you are not calculating speed at time “t” but the average speed between
, Newton objects by saying that you are not calculating speed at time “t” but the average speed between 
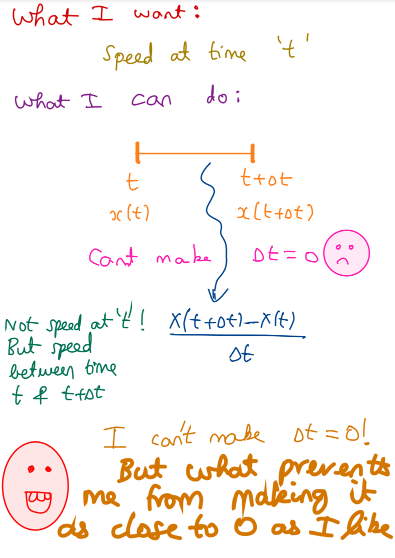

 from
from 
 for any
for any  closer to
closer to  . But some one complained that it is not the speed at “t” but an average state of affairs between “t, t+
. But some one complained that it is not the speed at “t” but an average state of affairs between “t, t+ . But again someone else complained that it also isn’t the instantaneous speed. But an average state of affairs between “t, t+0.5
. But again someone else complained that it also isn’t the instantaneous speed. But an average state of affairs between “t, t+0.5 . But even then someone else complained. So I calculated for
. But even then someone else complained. So I calculated for . I kept on doing this. I realized that I was just wasting my time satisfying the whims and fancies of every person. I realized that how much ever I reduced my interval
. I kept on doing this. I realized that I was just wasting my time satisfying the whims and fancies of every person. I realized that how much ever I reduced my interval 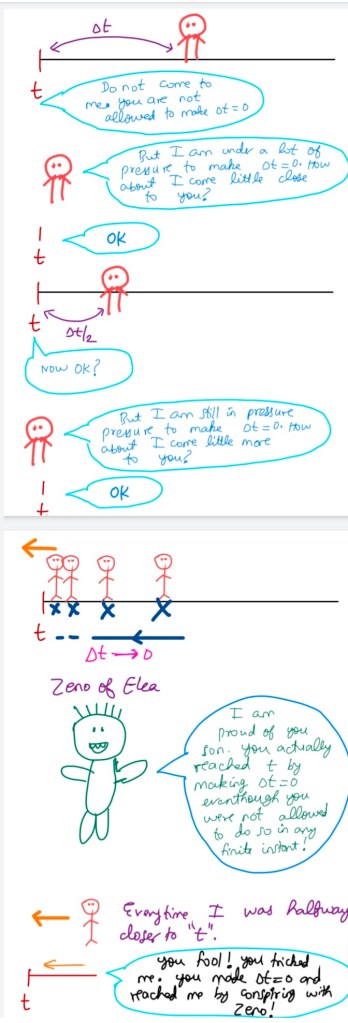


 , putting
, putting 
 !
! , the good old formula for differentiation in high school!
, the good old formula for differentiation in high school! ,
, 
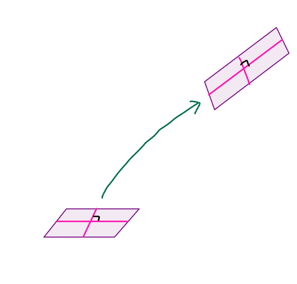
 in Russia. The reason is that if I see something holding true for my geometric object here in Chennai, I can translate it and rotate it to Russia and since they have preserved all distances and angles, they preserve all the geometric properties of the triangle (as it is carried away to Russia by translation and rotation) as everything in geometry is defined in terms of distances and angles.
in Russia. The reason is that if I see something holding true for my geometric object here in Chennai, I can translate it and rotate it to Russia and since they have preserved all distances and angles, they preserve all the geometric properties of the triangle (as it is carried away to Russia by translation and rotation) as everything in geometry is defined in terms of distances and angles. 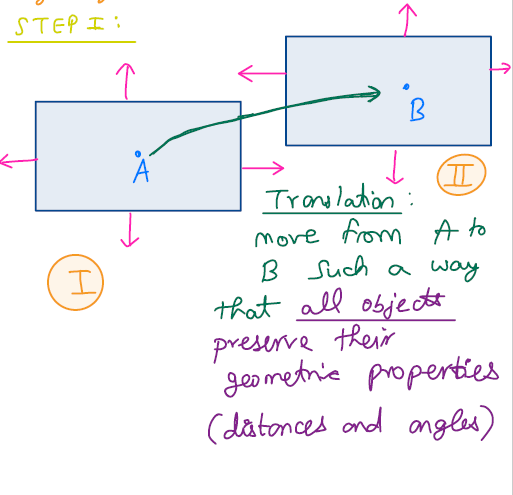
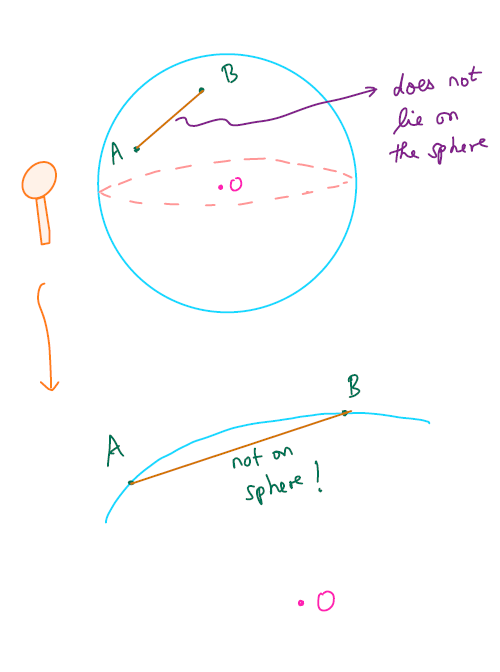
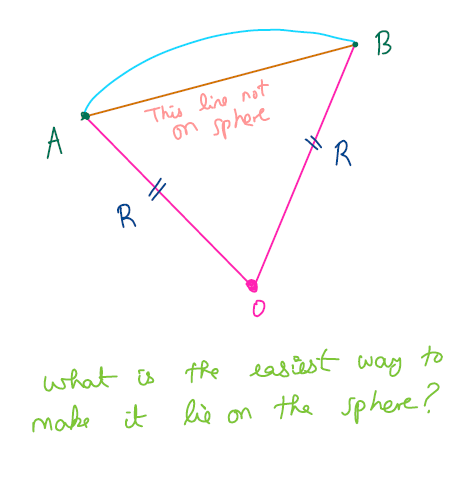
 . But our line segment AB in space is not so. So the simplest job would be to make all such points on the line satisfy this condition by pulling them to the
. But our line segment AB in space is not so. So the simplest job would be to make all such points on the line satisfy this condition by pulling them to the 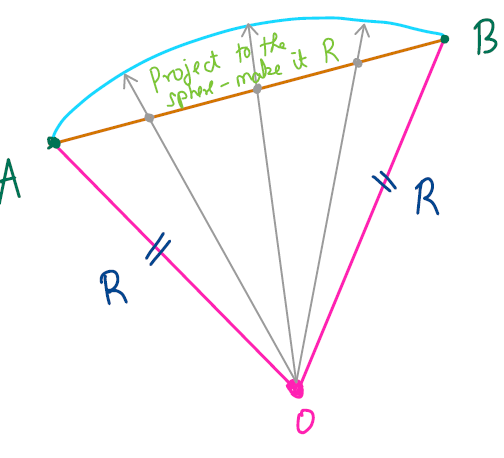
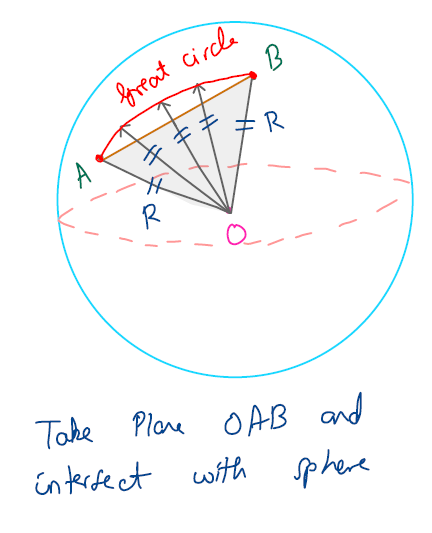
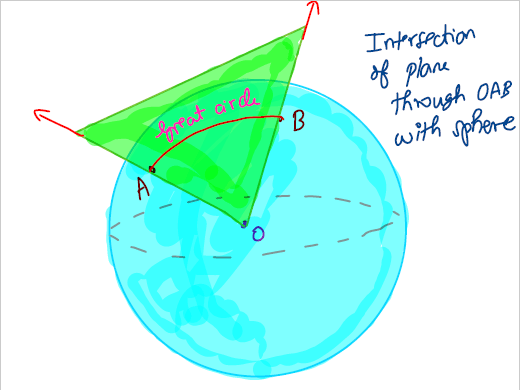
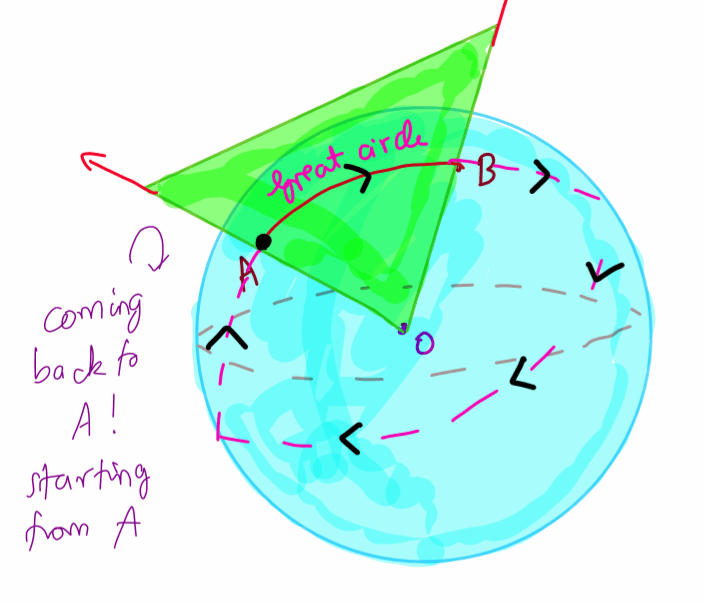
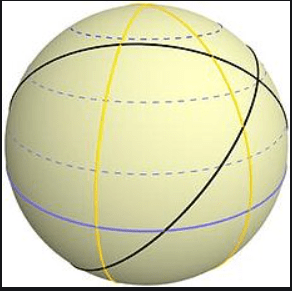
 . We measure distances as we did in Euclidean plane. We assign lengths to lines. Then distance between two points is the length of the line segment joining them. Here instead of line segments, we have the great circles and the full segment of the great circle is
. We measure distances as we did in Euclidean plane. We assign lengths to lines. Then distance between two points is the length of the line segment joining them. Here instead of line segments, we have the great circles and the full segment of the great circle is  and since half of it connects diametrically opposite points, we have that distance between them is
and since half of it connects diametrically opposite points, we have that distance between them is 
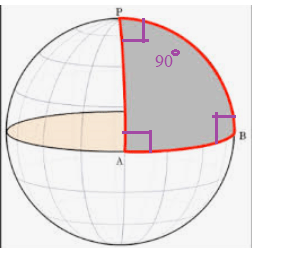
 (note that in theorem, angles are in radians and hence the expected sum is
(note that in theorem, angles are in radians and hence the expected sum is  instead of 180)
instead of 180)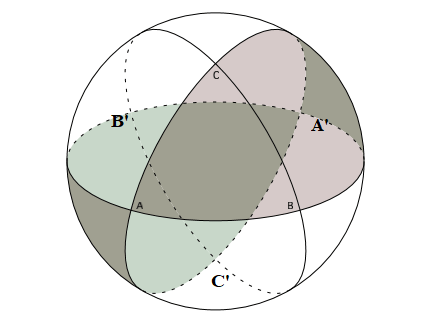
 .
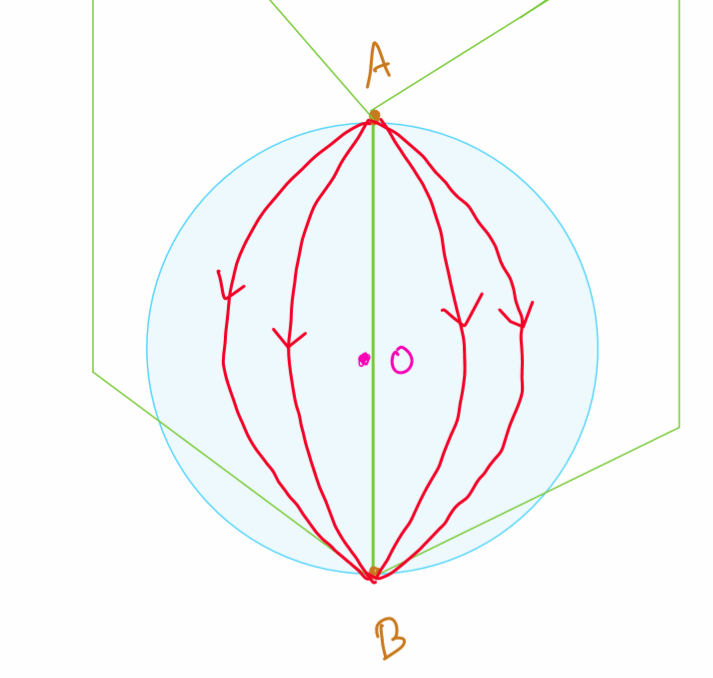
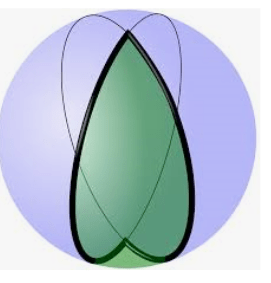
.  subtends an area of
subtends an area of  (including its antipodal mirror image)
(including its antipodal mirror image)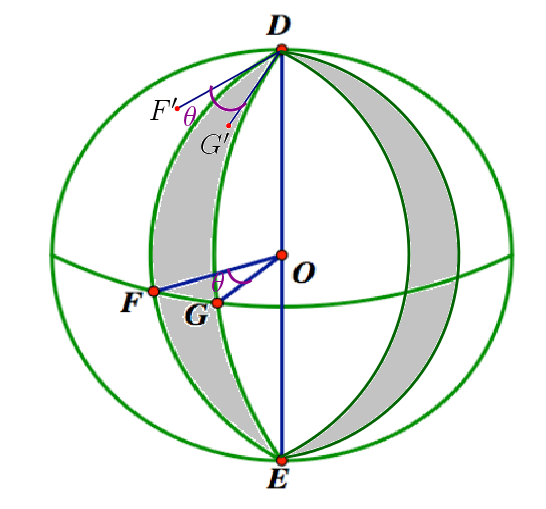
 . (including the antipodal area)
. (including the antipodal area) . So the area subtended by the lunes is
. So the area subtended by the lunes is  ( as area of unit sphere is
( as area of unit sphere is  ) and hence equals
) and hence equals  = sum of area of lunes= area of sphere +
= sum of area of lunes= area of sphere + 


 , spherical geometry reduces to Euclidean geometry and hence this can be regarded as a generalization of spherical trigonometry. Or as size of the triangle decreases keeping the area fixed, it approaches Euclidean plane geometry.
, spherical geometry reduces to Euclidean geometry and hence this can be regarded as a generalization of spherical trigonometry. Or as size of the triangle decreases keeping the area fixed, it approaches Euclidean plane geometry.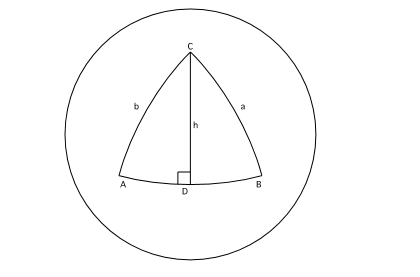

 ,
,  ,
,  ,
,  ,
,  . Putting this approximations, we get
. Putting this approximations, we get


 where
where  , there exists another triangle whose angles are exactly same as the given triangle but whose sides are proportional to the sides of the given triangle with the ratio
, there exists another triangle whose angles are exactly same as the given triangle but whose sides are proportional to the sides of the given triangle with the ratio 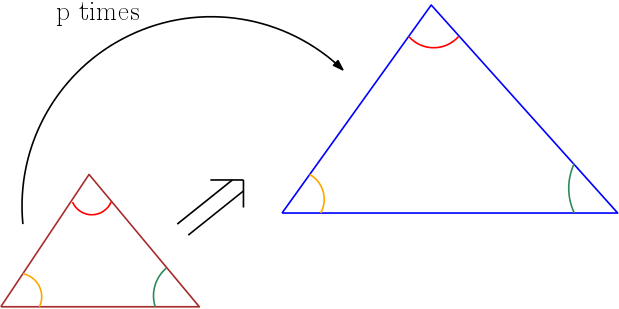




 is parallel to
is parallel to 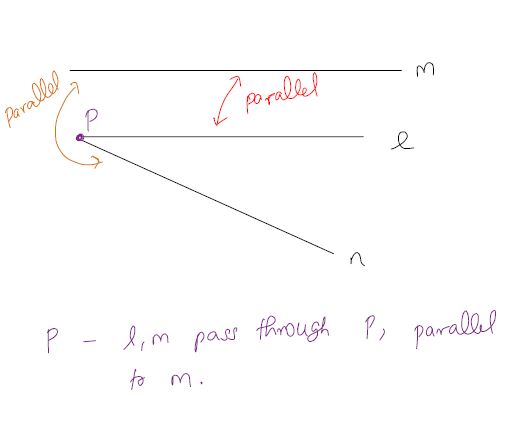
 such that length of
such that length of  perpendicular to
perpendicular to  as 1. So now we have two perpendicular lines meeting at
as 1. So now we have two perpendicular lines meeting at 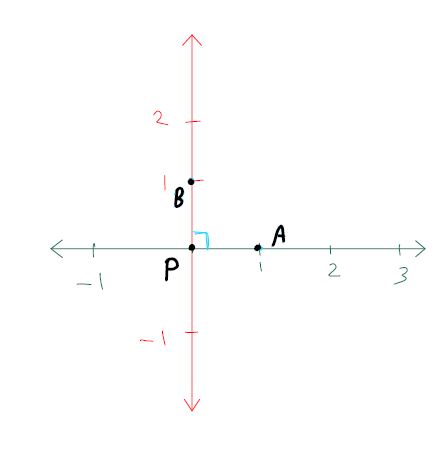
 in the plane now with the perpendicular lines
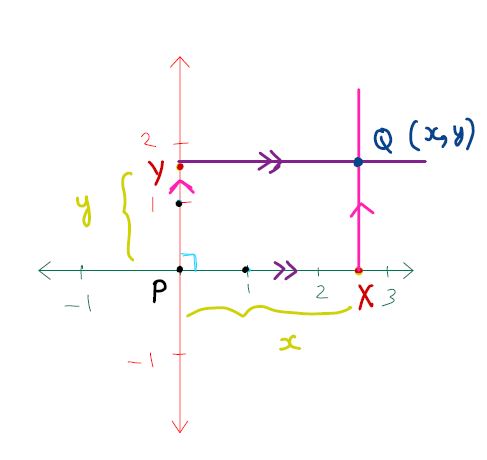
in the plane now with the perpendicular lines  drawn and extended. Now I am going to tell you how to assign two numbers
drawn and extended. Now I am going to tell you how to assign two numbers  associated with the point
associated with the point  and the number
and the number  ,
,  as the number on the number line
as the number on the number line 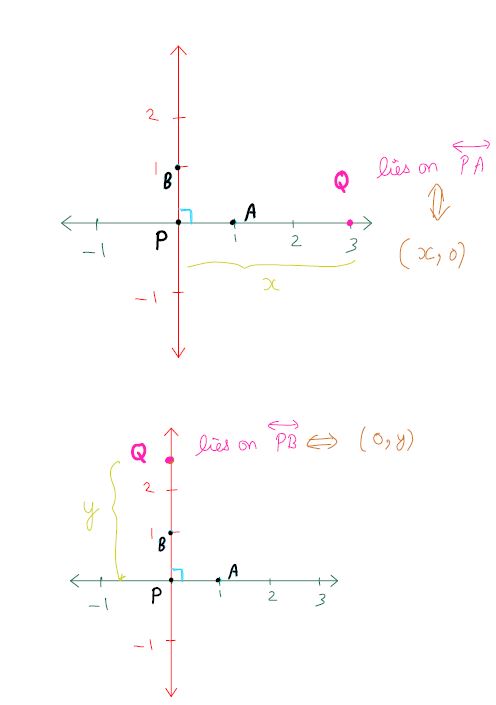
 , $l_y$ passing through
, $l_y$ passing through  be the intersection of
be the intersection of  be the unique line passing through
be the unique line passing through  be that point of intersection. Assign the value
be that point of intersection. Assign the value 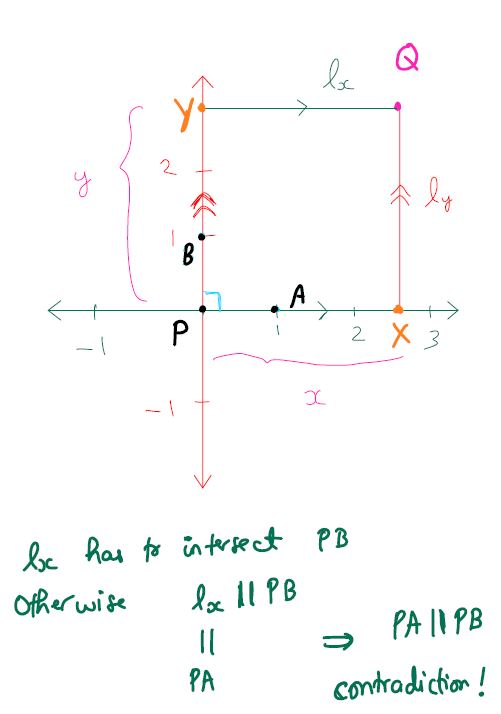
 share same
share same  . Then, they share the same points
. Then, they share the same points  in
in  and
and  meet at
meet at  both are parallel to
both are parallel to  lies in
lies in  . But two distinct lines
. But two distinct lines  intersect at a unique point.
intersect at a unique point.  . So, if both the coordinates
. So, if both the coordinates 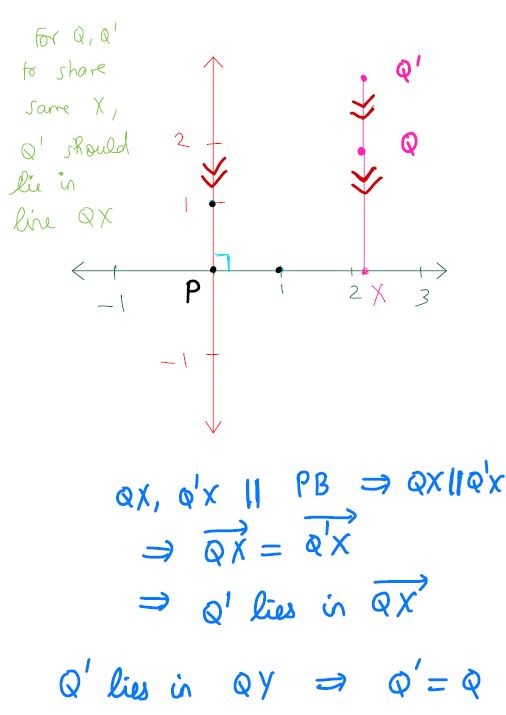
 as we have put a one-to-one correspondence of the plane with this set. Even for mensuration (measurement of distances and angles), we can forget about the plane and use the below formula to compute distances:
as we have put a one-to-one correspondence of the plane with this set. Even for mensuration (measurement of distances and angles), we can forget about the plane and use the below formula to compute distances:  and
and  respectively is given by
respectively is given by  , independent of the choice of the origin and x-axis of coordinates.
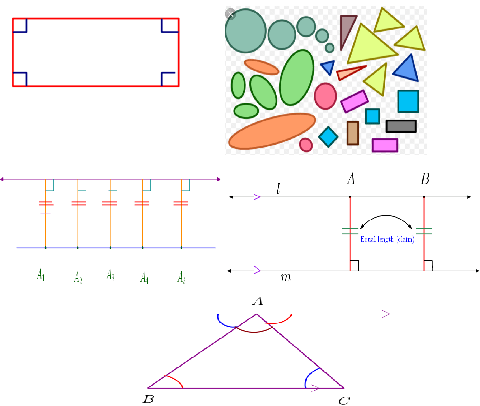
, independent of the choice of the origin and x-axis of coordinates. . Now, by construction, opposite sides of the quadrilateral are parallel (
. Now, by construction, opposite sides of the quadrilateral are parallel ( parallel to
parallel to  parallel to
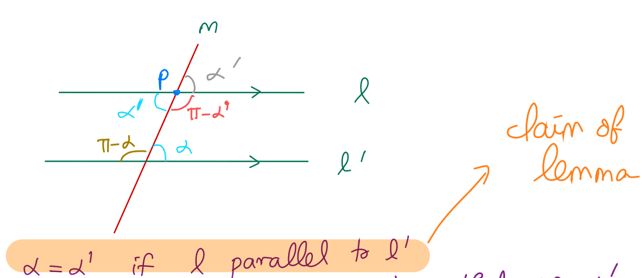
parallel to  ). So, all the angles are right angled. (By properties of angles cut by two parallel lines on the same line being equal). So, the quadrilateral is actually a rectangle. (a rectangle is a quadrilateral where all angles are right angled). Now use the following lemma below:
). So, all the angles are right angled. (By properties of angles cut by two parallel lines on the same line being equal). So, the quadrilateral is actually a rectangle. (a rectangle is a quadrilateral where all angles are right angled). Now use the following lemma below: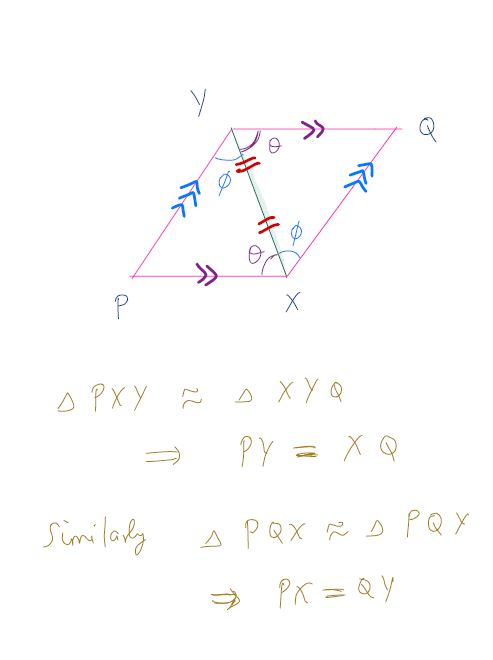
 to make it the diagonal. Now, consider the triangles
to make it the diagonal. Now, consider the triangles  and
and  . One of their sides
. One of their sides  ). Now, angle
). Now, angle  =angle
=angle  (property that alternate interior angles are equal). Similarly, angle
(property that alternate interior angles are equal). Similarly, angle  (same property). Hence, we have that the two triangles share the same side and the two included angles. If we prove that both the triangles are congruent (called ASA), then as corresponding parts of congruent triangles are equal, we have length of
(same property). Hence, we have that the two triangles share the same side and the two included angles. If we prove that both the triangles are congruent (called ASA), then as corresponding parts of congruent triangles are equal, we have length of  =length of
=length of  = length of
= length of  and
and  are opposite sides of the parallelogram, the lemma follows after we prove the ASA congruence.
are opposite sides of the parallelogram, the lemma follows after we prove the ASA congruence. share an equal side length (say lengths
share an equal side length (say lengths  ) and share the same pair of angles that emante from the sides (i.e. Angle
) and share the same pair of angles that emante from the sides (i.e. Angle  = Angle
= Angle  and Angle
and Angle  =Angle $C’B’A’$, then the two triangles are congruent. i.e. They can be obtained from translating and rotating each other
=Angle $C’B’A’$, then the two triangles are congruent. i.e. They can be obtained from translating and rotating each other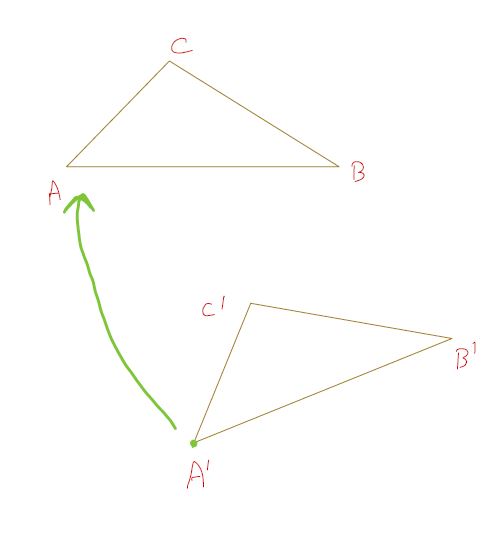
 to
to  to coincide with the line
to coincide with the line  . Now since length of
. Now since length of  and has same angle,
and has same angle,  . Now,
. Now,  as well since the angles
as well since the angles  , $CBA,C’B’A’$ are equal. So, we have that triangle
, $CBA,C’B’A’$ are equal. So, we have that triangle  could be translated and rotated to give
could be translated and rotated to give  . Hence the two triangles are congruent.
. Hence the two triangles are congruent.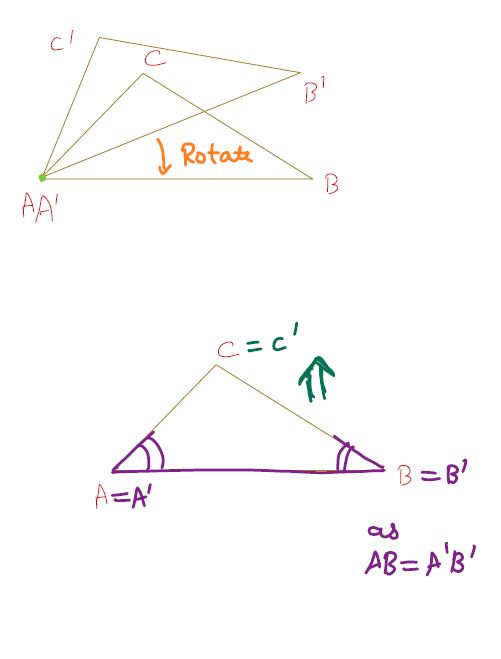
 and
and  . Now as triangle
. Now as triangle  is right angled, by Pythagoras Theorem,
is right angled, by Pythagoras Theorem,  and hence, since length of PQ is distance between
and hence, since length of PQ is distance between  , we have
, we have  ,
,  . Now here comes the general case. If
. Now here comes the general case. If ![dist[(x_1,y_1),(x_2,y_2)]=\sqrt{(x_2-x_)^2+(y_2-y_1)^2}](https://s0.wp.com/latex.php?latex=dist%5B%28x_1%2Cy_1%29%2C%28x_2%2Cy_2%29%5D%3D%5Csqrt%7B%28x_2-x_%29%5E2%2B%28y_2-y_1%29%5E2%7D&bg=FFFFFF&fg=181818&s=0&c=20201002) . Suddenly, geometry becomes about numbers. We can compute with points. In fact, a plane is now just a set of possibilities of a pair of real numbers. But notice that the set of pair of real numbers is abstract compared to the concrete notions of points, lines and planes. So, this computational aspect of turning the plane into
. Suddenly, geometry becomes about numbers. We can compute with points. In fact, a plane is now just a set of possibilities of a pair of real numbers. But notice that the set of pair of real numbers is abstract compared to the concrete notions of points, lines and planes. So, this computational aspect of turning the plane into  . Then, the tip of the diagonal
. Then, the tip of the diagonal  !
!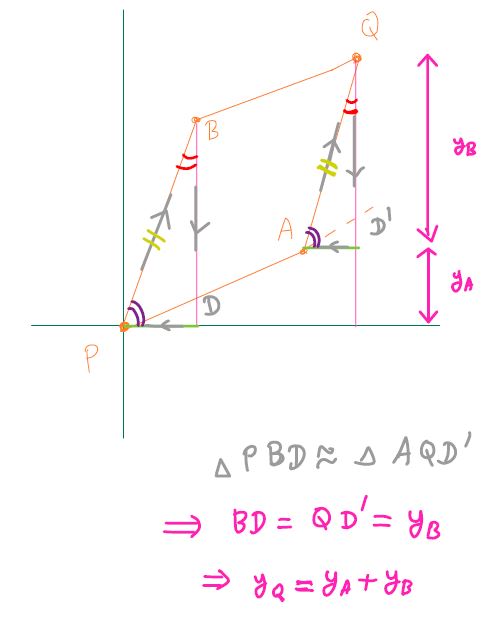
 is a parallelogram and the constructions are as below:
is a parallelogram and the constructions are as below: where
where  . If
. If  be the segment obtained by extending $PA$ in the opposite side of same length. Then the tips of the diagonals of the parallelograms completing
be the segment obtained by extending $PA$ in the opposite side of same length. Then the tips of the diagonals of the parallelograms completing  are respectively, by cosine rule,
are respectively, by cosine rule,  respectively. From this we can determine the angle
respectively. From this we can determine the angle  where
where  ,
,  . But lengths of
. But lengths of  is nothing but the length of the tip of the diagonal of that parallelogram. We know its coordinates if
is nothing but the length of the tip of the diagonal of that parallelogram. We know its coordinates if  for some
for some  such that
such that  . Define two lines (a,b,c), (a’,b’,c’) as parallel lines if they satisfy
. Define two lines (a,b,c), (a’,b’,c’) as parallel lines if they satisfy  . Notice that two lines are the same if
. Notice that two lines are the same if  . [The above definitions might look obvious to you as this is what was defined as the equation of a straight line in high school. But the subtle logic here is that in a straight line, the ratio of increments between the two coordinates has to be constant – called the slope – from Euclidean geometry – try drawing and seeing for yourself and proving this that for straight line making angle
. [The above definitions might look obvious to you as this is what was defined as the equation of a straight line in high school. But the subtle logic here is that in a straight line, the ratio of increments between the two coordinates has to be constant – called the slope – from Euclidean geometry – try drawing and seeing for yourself and proving this that for straight line making angle  with its perpendicular vertical line, should satisfy that the ratio of increment in vertical distances and horizontal distances between any two points is
with its perpendicular vertical line, should satisfy that the ratio of increment in vertical distances and horizontal distances between any two points is  and hence a constant ]. Translating this fact into coordinates using the correspondence inspires the equation in the definition.
and hence a constant ]. Translating this fact into coordinates using the correspondence inspires the equation in the definition. 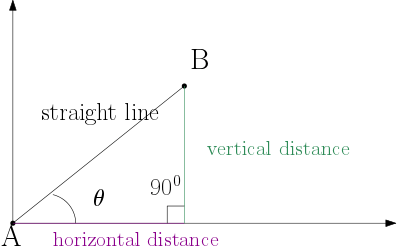
 as the set
as the set  . Inspiration is below:
. Inspiration is below: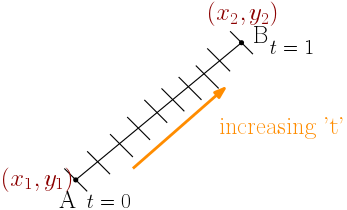
 , which can be rearranged to give an equation of the form
, which can be rearranged to give an equation of the form  extend the two points
extend the two points 



 and radius r>0 as the set
and radius r>0 as the set  and this obviously has a non empty solution set (take x=a, y=
and this obviously has a non empty solution set (take x=a, y= for instance) . So this holds.
for instance) . So this holds. . Define the line L’ as
. Define the line L’ as  . Obviously (u,v) lies on this line L’ as we have au+bv+c=d. L and L’ are parallel as
. Obviously (u,v) lies on this line L’ as we have au+bv+c=d. L and L’ are parallel as  .
. 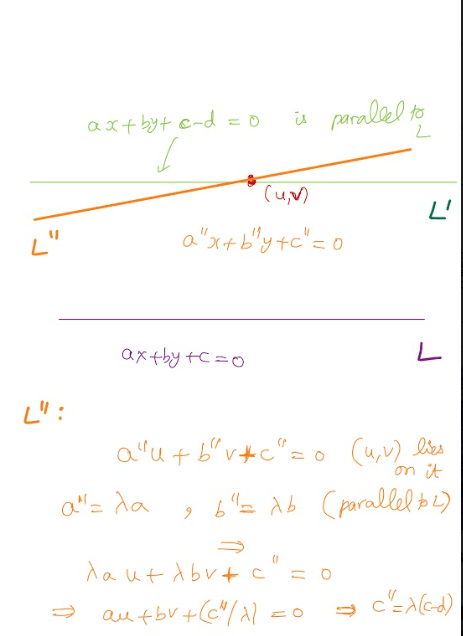
 ,
,  ,
,  . So, L” is same as L’ as all the coefficients are proportional!!!!
. So, L” is same as L’ as all the coefficients are proportional!!!!